

核心:整车以博世经典的五域分类拆分为动力域、底盘域、座舱域/智能信息域、无人驾驶域和车身域,这五大域控制模块共同集成了L3及以上级别无人驾驶车辆的所有控制功能。
动力域(安全)动力域控制器,作为智能化的动力总成管理单元,通过CAN/FLEXRAY技术实现变速器、引擎的精细管理,电池状态的实时监控,以及交流发电机的精准调节。其核心优点是为多种动力系统单元(如内燃机、电动机、发电机、电池和变速箱)进行扭矩计算与分配,通过前瞻性驾驶策略促进CO2减排,同时提供通信网关功能。该控制器不仅优化动力总成性能,还具备电气智能故障诊断、智能节电和总线通信等多样化功能。
软硬件平台,对动力域内子控制器进行功能整合,实现ECU基本功能的集成,以及面向动力域协同优化的VCU、Inverter、TCU、BMS和DCDC等高级域层次算法的集成。B)确保ASIL-C安全等级,融入SOTA技术、信息安全功能和通讯管理能力。C)支持CAN/CAN-FD和Gigabit Ethernet等多种通讯类型,并提供SHA-256加密算法保障通讯安全。4)随着CPU和GPU的发展,动力域控制器需要支持Adapative Autosar环境,并提高主频至2G以上,以适应Linux系统及其他支持POSIX标准接口的操作系统。在2020年1月16日,合众汽车工程研究院成功将动力域控制器搭载于哪吲汽车,并一次性通过搭载车辆测试,标志着合众PDCS动力域控制器已郑重进入量产应用阶段。该系统采用英飞凌多核处理器,主频高达200MHz,具备DSP数字信号处理及浮点运算能力,为Hozon PDCS提供高速解决能力。同时,采用三核并带锁步核的主芯片,实现更高功能安全,按照ASIL C功能安全等级开发,有效保障用户出行安全。V模型开发流程确保每一步都可验证,软件失效率低于3%,结合AUTOSAR架构+MBD建模与控制,明显提高软件可靠性。此外,该控制器还能实时监控电控系统,智能协调及监控动力输出,从而提升驾控性能及安全性。同时,它还能保护电池安全,根据系统需求同步优化能量分配,增加续航里程。合众PDCS动力域控制器,搭载高性能英飞凌多核处理器,主频高达200MHz,配备DSP数字信号处理及浮点运算能力,为系统提供卓越的高速处理性能。采用三核并带锁步核的主芯片,确保更高的功能安全性,符合ASIL C功能安全等级,为用户出行保驾护航。通过V模型开发流程,每一步均经过严格验证,软件失效率控制在3%以下,结合AUTOSAR架构与MBD建模控制,明显提升软件可靠性。此外,实时监控电控系统、智能协调动力输出等功能,逐步优化驾控性能与安全性,同时保障电池安全,智能分配能量,延长续航能力。

哪吒U,作为哪吒汽车的第二款量产车型,以其独特魅力和卓越性能,在汽车市场上崭露头角。这款车型不仅继承了合众PDCS动力域控制器的创新技术与安全性能,更在驾控体验和续航里程上实现了新的突破。通过实时监控电控系统、智能协调动力输出等功能,哪吒U逐步优化了驾驶性能与安全性,为用户所带来更加安心、舒适的出行体验。同时,其智能分配能量的设计,更是有效延长了续航能力,满足了用户对于续航和动力的双重需求。

底盘域,与汽车行驶紧密相关,涵盖了传动系统、行驶系统、转向系统和制动系统等多个角度。传动系统负责把发动机的动力传递给驱动轮,其类型包括机械式、液力式和电力式等。行驶系统则将汽车各部分连接成一个整体,并起着重要的支承作用。转向系统则确保汽车能按照驾驶员的意愿进行直线或转向行驶。而制动系统,通过在汽车车轮上施加与行驶方向相反的外力,实现对汽车的强制制动,以确保减速停车和驻车制动的功能。
随着汽车智能化的发展,线控底盘技术逐渐崭露头角。线控底盘涵盖了线控转向、线控制动、线控换挡、线控油门以及线控悬挂等多个系统。其中,线控制动作为面向无人驾驶执行端的核心产品,其技术难度尤为突出。目前,汽车制动系统正经历着从机械、液压到电子(如ABS/ESC)的演变,而未来则有望逐步发展为线无人驾驶时代,线控制动已大范围的应用于燃油车、混动车和纯电动车三大领域。随着汽车智能化趋势的推进,线控制动因其电信号传递的快速响应和短刹车距离优势,正慢慢的变成为未来汽车智能化的必然选择。线控制动系统大致上可以分为液压式线控制动(EHB)和机械式线控制动(EMB)两大类型。EHB系统因其内置的备用制动系统而拥有较高的安全性,这使得它成为当前广泛推广并量产的优选方案。然而,EMB系统由于缺乏备用制动系统且技术上的支持相对不足,其短期内的大规模应用面临挑战,但长远来看,它无疑是未来发展的趋势。接下来,我们将对EHB系统和EMB系统来进行详细的比较分析。线控制动系统是汽车技术领域中的一大挑战,全世界内,博世、大陆、采埃孚等零部件巨头是该领域的主要玩家。在国外,EHB技术已相对成熟,但目前仍难以完全满足L4级无人驾驶的需求,而国内有关技术正在奋力追赶。相比之下,EMB技术尚处于研究阶段,目前面临较大的突破难题。值得一提的是,博世的iBooster是一款有代表性的直接型EHB产品,常与ESP系统协同工作。然而,ESP系统本身也存在失效可能,且其设计初衷主要是为AEB类紧急制动情况服务,并不适合常规制动需求。因此,为了应对L3和L4级无人驾驶的挑战,博世在第二代iBooster的基础上,进一步推出了IPB+RBU线)智能化推动线控转向技术的诞生
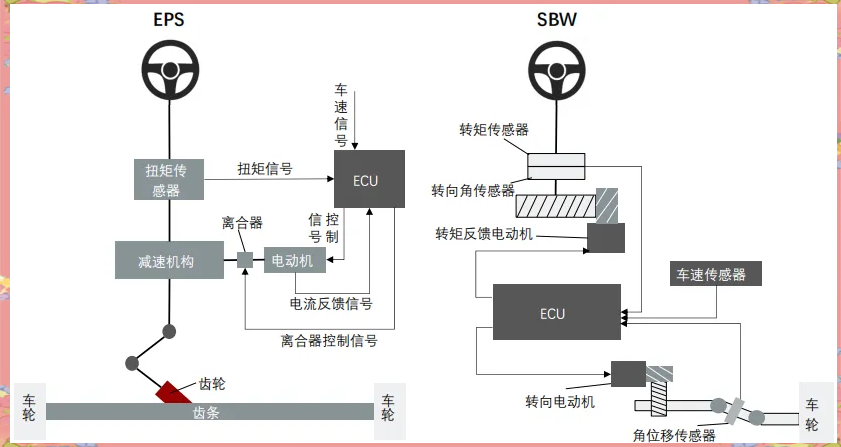
随着智能化的发展,L3及以上等级的智能汽车要求在部分或全程中驾驶员能脱离操控,这逐步推动了线控转向(Steering By Wire, SBW)技术的出现。传统的转向系统,如机械式转向系统(MS)、液压助力转向系统(HPS)、电控液压助力转向系统(EHPS)和电动助力转向系统(EPS),已不足以满足这些高级别无人驾驶的需求。
线控转向系统通过电子信号连接驾驶员输入接口(如方向盘)与执行机构(如转向轮),消除了直接的液力或机械连接。它依赖于助力电机接收电信号指令来精确控制转向系统。有必要注意一下的是,SBW技术的发展与EPS紧密相关,且其系统模块设计需要具备冗余功能以增强安全性。
当前,SBW系统主要是采用两种方式来实现冗余功能:一是完全取消方向盘与转向执行机构的机械连接,通过多个电机和控制器来提升系统的可靠性;二是在方向盘与转向执行机构之间加入电磁离合器作为备用措施,以增加系统的容错能力。
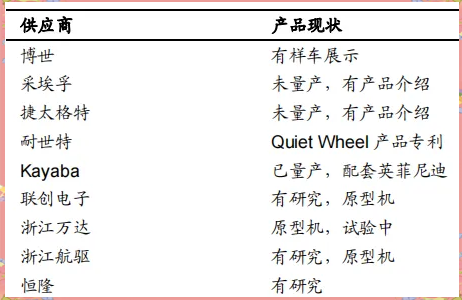
从全球范围来看,EPS的主要供应商包括博世、捷太格特、NSK、耐世特等国际有名的公司。这些供应商中,日本企业多以精密轴承为基础,逐步拓展至EPS领域;而美国和欧洲的供应商则多从tier 1级别横向进军EPS。相较之下,中国的主要供应商如株洲易力达、湖北恒隆和浙江世宝,在规模和技术方面仍需努力追赶。此外,EPS的客户群体也相当广泛,包括汽车制造商、零部件供应商以及一些科研机构等。
线控转向系统(SBW)因涉及技术、资本及安全等多方面高要求,其核心技术目前主要掌握在海外零部件巨头手中,导致该领域的进入壁垒极高。然而,近年来国内企业如联创电子和浙江万达已开始慢慢地涉足SBW领域,预示着国内企业未来在该业务领域可能取得突破。接下来,我们将详细探讨线控转向系统(SBW)的主要供应商及其产品现状。
传统的座舱域由多个分散的子系统或模块组成,这种架构已不足以满足现代汽车对于多屏联动、智能驾驶等复杂功能的需求。因此,座舱域控制器这一集中式的计算平台应运而生。智能座舱涵盖了全液晶仪表、中控大屏、车载信息娱乐系统、抬头显示等多项功能,其中,域控制器扮演着核心角色。它通过以太网、MOST总线或CAN总线等网络连接,实现了仪表盘、导航等部件的协同工作。此外,座舱域控制器还进一步融合了智能驾驶ADAS系统和车联网V2X系统,从而优化了驾驶体验和车载互联功能。
智能驾驶辅助系统是现代汽车不可或缺的一部分,它包含了感知层、决策层和执行层三大核心组件。感知层主要依赖车载摄像头、毫米波雷达等传感器来获取车辆四周的环境信息。这些传感器与车身上的速度传感器、角度传感器等协同工作,为决策层提供全面的数据支持。而座舱域控制器则在这一过程中发挥着至关重要的作用,它通过独立感知层收集车内外的各种数据,并结合生物识别技术如人脸识别、声音识别等,综合判断驾驶员的生理和行为状态。这样,系统就能根据实际的需求推送相应的交互请求,实现更智能、更人性化的驾驶体验。同时,车内交互方式也从单一的物理按键交互升级为触屏交互、语音交互、手势交互等多种方式并存的状态。多模交互技术的运用,更是将“视觉”、“语音”等模态的感知数据融合在一起,提供了更精准、更智能的交互体验。

在座舱电子域控制器领域,伟世通和Aptiv分别推出了各自的领先方案。伟世通推出的Smart Core方案,旨在将信息娱乐、仪表板、信息数据显示、HUD、ADAS和网联系统来进行高度集成。据伟世通介绍,其方案不仅仅具备出色的扩展性,还提供了高水平的网络安全保障,能够轻松实现独立的功能域。而Aptiv则推出了集成驾驶舱控制器(ICC),该方案采用了英特尔最新的汽车处理器系列,支持多达四个高清显示器,并具有非常出色的可扩展性,可适应从入门级到高端产品的各种需求。ICC在图形解决能力(提升10倍)和计算能力(提升5倍)方面带来了显著改进,通过单芯片中央计算平台,可轻松驱动仪表、HUD和中央堆栈等多个座舱显示器。
无人驾驶域控制器是车辆实现自动驾驶功能的核心部件。它能够融合多传感器数据,进行实时定位、路径规划和决策控制。为实现这些功能,域控制器需要与摄像头、毫米波雷达、激光雷达等设备相连,进行图像识别和数据处理。与传统的搭载外设工控机和控制板的方案相比,现代无人驾驶域控制器更加简洁高效,核心在于强大的芯片处理能力。
在算法层面,无人驾驶汽车通过车载传感器感知周围环境,包括激光雷达、毫米波雷达、摄像头、GPS和惯导等。这些传感器提供的数据经过域控制器处理,形成对环境的感知和理解。通过适当的决策模型,域控制器制定出相应的驾驶策略,控制车辆沿着规划好的路径行驶。
为了满足无人驾驶的算力需求,域控制器需要配备一个高性能处理器。目前市场上,多个供应商如NVIDIA、华为、瑞萨、NXP、TI、Mobileye等都提供了不同的解决方案。这些方案在提供强大算力的同时,也注重系统的安全性和稳定性。
在自动驾驶技术的推动下,慢慢的变多的汽车供应商与Tier1厂商开始涉足这一领域。他们通过不停地改进革新和优化,为广大购买的人提供更加安全、舒适的驾驶体验。
随着汽车技术的持续不断的发展,车身控制器数量逐渐增多。为降低成本并减轻整车重量,车身域控制器应运而生,旨在将原本分散在车头、车中、车尾的多个功能器件,如后刹车灯、后位置灯、尾门锁以及双撑杆等,进行统一集成。这一技术趋势推动了车身域控制器的演变,从原先分散的功能组合,慢慢地发展为集成了车身电子基础驱动、钥匙功能、车灯、车门、车窗等众多功能的大控制器。
车身域控制管理系统涵盖了灯光、雨刮洗涤、中控门锁、车窗控制等多项功能。同时,它还集成了PEPS智能钥匙、低频天线、电子转向柱锁等先进的技术。此外,车身域控制器在通信方面也经历了从传统架构到混合架构,再到最终Vehicle Computer Platform的升级过程。在这样的一个过程中,通信速度的提升以及高功能安全基础算力的价格下降,成为了推动车身域控制器发展的关键因素。
目前,车身域电子系统领域对于国内外企业而言都尚处于开发初期。国外企业在如BCM、PEPS、门窗、座椅控制器等单功能产品上拥有深厚的技术积累,而国内企业则面临产品线单产品相对低端等挑战。因此,从整个车身域重新布局和定义系统集成产品,对于国内企业来说将是一项艰巨的任务。
